Characterization of the LoRa radio signal and upcoming tests - January-February 2020
Testing of new tags and receiving stations (version 3):
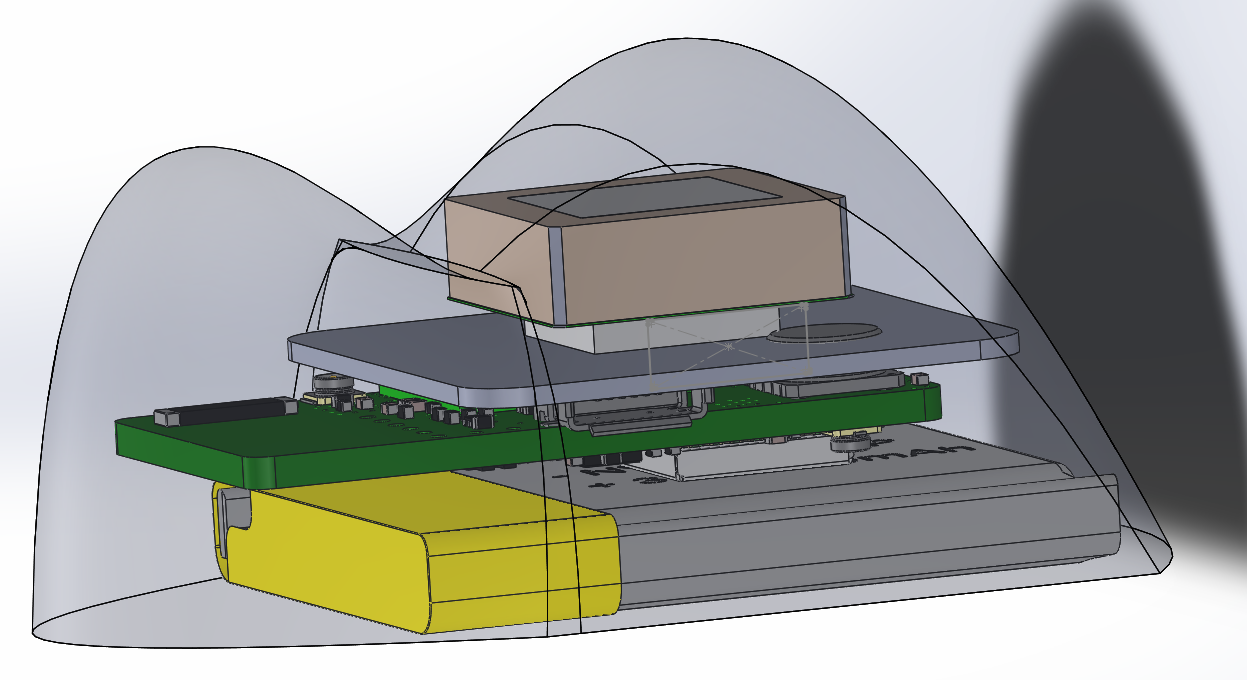
The new version 3 of the tag will soon be tested, during 3 days in February 2020, this time on a sea turtle of the experimental platform of Kélonia, in order to confirm the improvements made and in particular of the geolocation algorithm.
|
Design of the version 3 tag based on computer-aided design © IFREMER, Pierre GOGENDEAU |
Freshly arrived at Ifremer, the new receiver stations will soon be tested in order to check their correct operation.
|
Version 3 of the gateways or receiver stations |

Characterization of the LoRa radio signal:
Further tests are scheduled in February to characterize the LoRa radio signal on the water surface. For this purpose, several receiving stations will be placed on sites at different heights in order to measure the power of the received signal and to determine on the one hand the importance of the height and positioning of the stations for reception and on the other hand the maximum transmission distance.
![]() In parallel with the technological developments of the equipment, the team is working with a Reunionese company, IDOCEAN, on the design of an autonomous USV (Unmanned Surface Vehicle) board controlled by an autopilot. The objective is to use this board to characterize the LoRa radio channel by emitting LoRa signals at defined positions at sea surface. The motorization of this board allows it on the one hand to follow a predefined trajectory and on the other hand to keep a sub-centimetric GPS position even in case of current or swell.
In parallel with the technological developments of the equipment, the team is working with a Reunionese company, IDOCEAN, on the design of an autonomous USV (Unmanned Surface Vehicle) board controlled by an autopilot. The objective is to use this board to characterize the LoRa radio channel by emitting LoRa signals at defined positions at sea surface. The motorization of this board allows it on the one hand to follow a predefined trajectory and on the other hand to keep a sub-centimetric GPS position even in case of current or swell.
All the information transmitted by the board as well as the sending of commands to the board is done remotely via a 3G and 4G mobile network. This mobile network also allows the reception of a live video stream thanks to the presence of a camera placed on the board, which is used to steer the board in manual mode if necessary.

The board is also equipped with an echosounder to carry out bathymetric surveys of the project sites. This bathymetry will enable us to improve the geolocation algorithms by coupling the information on the depth of sea turtles and bathymetry at the same spot.
Coupled to the bathymetry sensor, a camera takes underwater pictures with the aim of mapping these images and then making a 3D reconstruction of the seabed visited. At shallow depths, this camera will also enable us to reconstruct the bathymetry using photogrammetry.
By combining all these information, IDOCEAN is developing an open source software which will allow us to reconstruct the habitats in 3D and produce bathymetry maps for each study sites. These information will be used to link the turtle trajectories to their habitats.

Autonomous board © IFREMER