Caractérisation du signal radio LoRa et tests à venir - janvier-février 2020
Tests des nouvelles balises et stations de réception (version 3) :
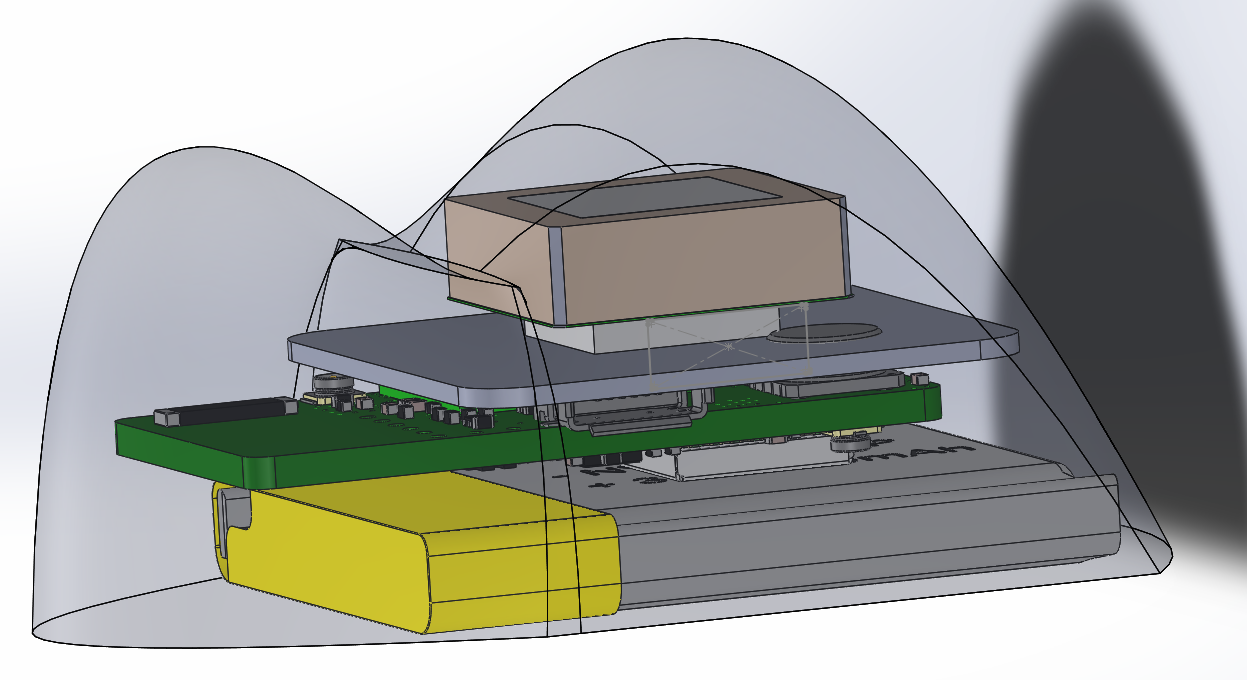
La nouvelle version 3 de la balise va prochainement être testée, durant 3 jours au mois de février 2020, cette fois sur une tortue marine de la plateforme expérimentale de Kélonia, afin de confirmer les améliorations apportées et notamment de l’algorithme de géolocalisation.
|
Design de la balise version 3 réalisé à partir d’une conception assistée par ordinateur © IFREMER, Pierre GOGENDEAU |
Fraîchement arrivés à l’Ifremer, les nouveaux boitiers de réception feront prochainement l’objet d’essais afin de vérifier leur bon fonctionnement.
|
Version 3 des gateways ou boitiers de réception |

Caractérisation du signal radio LoRa :
D’autres tests sont programmés en février afin de caractériser le signal radio LoRa à la surface de l’eau. Pour cela, plusieurs stations de réception seront placées sur des sites à différentes hauteurs pour mesurer la puissance du signal reçue et déterminer d’une part l’importance de la hauteur et du positionnement des stations pour la réception et d’autre part pour connaître la distance maximale de réception.
![]() En parallèle des développements technologiques du matériel, l’équipe travaille avec une société réunionnaise IDOCEAN, sur la conception d’une planche autonome USV (Unmanned Surface Vehicle pour Véhicule de surface non habité) contrôlée par un pilote automatique. L’objectif est de pouvoir utiliser cette planche pour caractériser le canal radio LoRa en émettant des signaux LoRa à des positionnements définis à la surface de l’eau. La motorisation de cette planche lui permet d’une part de suivre une trajectoire prédéfinie et d’autre part de maintenir une position GPS au centimètre près même en cas de courant ou de houle.
En parallèle des développements technologiques du matériel, l’équipe travaille avec une société réunionnaise IDOCEAN, sur la conception d’une planche autonome USV (Unmanned Surface Vehicle pour Véhicule de surface non habité) contrôlée par un pilote automatique. L’objectif est de pouvoir utiliser cette planche pour caractériser le canal radio LoRa en émettant des signaux LoRa à des positionnements définis à la surface de l’eau. La motorisation de cette planche lui permet d’une part de suivre une trajectoire prédéfinie et d’autre part de maintenir une position GPS au centimètre près même en cas de courant ou de houle.
Toutes les informations transmises par la planche ainsi que l’envoi des commandes à celle-ci se font à distance via un réseau mobile 3G et 4G. Ce réseau mobile permet également la réception d’un flux vidéo en direct grâce à la présence d’une caméra placée sur la planche, qui sert à diriger la planche en mode manuel au besoin.

La planche est également équipée d’un échosondeur mono-faisceau afin de réaliser des relevés bathymétriques des sites d’étude du projet. Cette bathymétrie permettra d’améliorer les algorithmes de géolocalisation en couplant les informations sur les profondeurs des tortues et celles de la bathymétrie.
Couplée au capteur de bathymétrie, une caméra prend des photos sous-marines avec pour objectif la réalisation d’une cartographie de ces images puis à termes d’une reconstruction 3D des fonds marins visités. Sur des petits fonds, cette caméra permettra aussi de reconstituer les fonds par photogrammétrie.
En combinant toutes ces sources d’informations, IDOCEAN développe une suite logicielle open source permettant de reconstruire en 3D les habitats et d’effectuer des cartes de bathymétrie pour chacun des sites d’étude. Ces informations permettront de lier les trajectoires des tortues et les habitats qu’elles utilisent.

Planche autonome © IFREMER